¿Estáis preparados para un curso rápido de electricidad? Espero que sí, porque de ésto es de lo que va la entrada de hoy.
Una locomotora eléctrica es un cacharro que transforma la electricidad en movimiento destinado a tirar o empujar trenes y hay muchos tipos de locomotoras eléctricas, tantas como formas de manejar la electricidad, pero básicamente se reducen a dos: corriente continua y corriente alterna.
Corriente continua
Históricamente, la corriente continua ha sido la más sencilla de tratar. No por nada en especial, sino porque los primeros ensayos eléctricos se hacían con pilas y baterías (o artefactos similares más primitivos) que entregaban este tipo de electricidad. Debido a ello, los más grandes avances en los inicios de la electricidad se hicieron con este tipo de corriente.
La corriente continua (que está mal llamada así puesto que lo que es continuo es el valor de la tensión) es, como su propio nombre indica, la que tiene un valor fijo y constante que se mantiene a lo largo del tiempo. Una fuente de tensión continua puede ser, por ejemplo, la pila del mando a distancia de la tele. Esa pila, mientras no se agote, va a dar siempre un valor fijo de tensión. Si hablamos de una pila de las de andar por casa, serán 1,5 Voltios. Si hablamos de la batería del móvil, serán 3,6 Voltios. Si hablamos de un coche o un camión, serán 12 ó 24 Voltios. Y si hablamos de la catenaria (en el caso de la mayor parte de la red de ADIF), serán 3.000 Voltios.
Como ya tenemos nuestra fuente de alimentación para los trenes, que va a ser la catenaria, vamos a ver dónde se transforma esa energía eléctrica en movimiento, o sea, los motores eléctricos.
Un motor eléctrico es un cacharro que lo enchufas y se mueve. Ejemplos de motores eléctricos de andar por casa: un taladro, el exprimidor de naranjas, la lavadora, el secador de pelo, la maquinilla de afeitar... Ejemplos de motores eléctricos un poquito más grandes: la depuradora de la piscina, bombas de extracción de agua, un tren (o metro o tranvía), un submarino nuclear... Todos ellos, sean del tamaño que sean, tengan la potencia que tengan, y estén diseñados con la tecnología que sea, están basados en lo mismo: el electromagnetismo.
El electromagnetismo es la utilización y generación de campos magnéticos por medio de la electricidad. ¿Y eso de campos magnéticos qué es? Pues, así en sencillo, imanes. Una serie de científicos, en los siglos XVII y XVIII descubrieron toda una serie de fenómenos magnéticos que se producían en presencia de electricidad, y es a lo que se llamó electromagnetismo. James Clerk Maxwell, un físico escocés, fue el encargado de unir todas esas experiencias en una serie de leyes matemáticas que describen ese fenómeno y que se conocen como Ecuaciones de Maxwell.
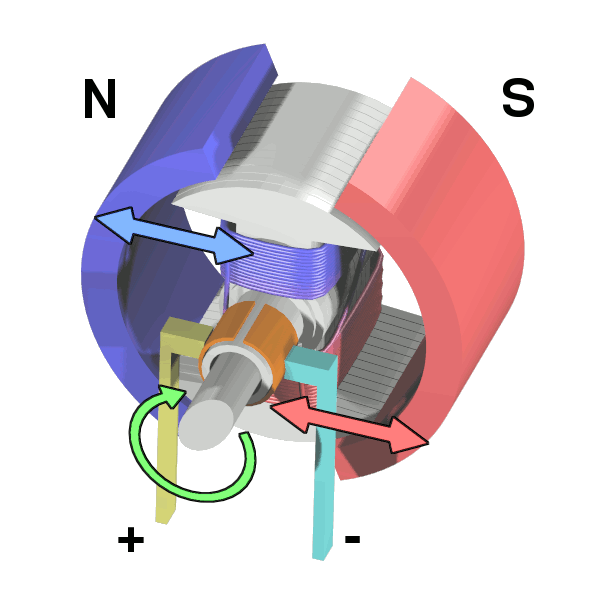
Aplicando estos fenómenos, se inventaron los motores eléctricos, de los cuales, el más sencillo sería el que describo ahora. Ponemos dos imanes con los polos opuestos enfrentados, o sea, Norte a la izquierda y Sur a la derecha, por ejemplo. A esta pieza le llamamos estátor. Dentro del estátor colocamos dos bobinas unidas a un eje giratorio. Las bobinas no son más que cables enrollados alrededor de un núcleo, normalmente de hierro (también las puede haber sin núcleo, pero para otras aplicaciones). A las puntas de las bobinas le ponemos unos contactos eléctricos que estarán fijadas en un lado del eje y alrededor de éste. Son las delgas. Algo así:
Cuando le aplicamos tensión a las bobinas, éstas generan un campo magnético, haciendo que el rotor (que así es como se llama esta pieza) se convierta en un imán. Si hemos conectado bien los polos de las bobinas, el imán tendrá una polaridad exactamente inversa a la de los imanes del estátor, es decir, que tenemos un imán con el polo Norte a la derecha y Sur a la izquierda. Como sabemos, de cuando íbamos al cole y hacíamos experimentos de estos en clase de ciencias (o tecnología, o como quiera que se llame ahora), los polos opuestos se atraen y los iguales se repelen. Por lo tanto, se genera una fuerza que hace que el rotor gire sobre su eje porque los polos del estátor lo están empujando. Una vez que el rotor ha empezado a girar, las escobillas (las piezas de grafito a través de las cuales le pasamos la corriente a las delgas) que están fijas en el estátor, pierden el contacto con las bobinas y dejan de alimentarlas. Pero como el rotor se está moviendo, llega un momento en que las delgas vuelven a entrar en contacto con las escobillas, por lo que, nuevamente, alimentamos las bobinas, y se vuelve a producir el mismo efecto. Y así, gracias al electromagnetismo es como creamos movimiento a partir de electricidad.
El motor que he descrito es el más sencillo y rudimentario, y tiene muchos inconvenientes (como que no sabes en qué dirección va a girar), así que para poder controlar mejor el moto, o darle más potencia, se ponen más bobinas en el rotor y más imanes en el estátor (también llamados inducidos o carcasas, respectivamente). Normalmente el número de polos del estátor es par (por eso de que los polos aislados no existen) y el número de bobinas del rotor es impar, creando así una diferencia que hará que nunca estén perfectamente enfrentados dos polos de la carcasa con dos bobinas del inducido.
En este tipo de motores, para conseguir más velocidad, se aplica más tensión. Y para que vaya más despacio, menos. Pero el problema que tenemos es que la catenaria tiene una tensión fija, por lo que, cuando conectáramos la catenaria al motor, éste empezaría a girar a la máxima velocidad, y eso no es lo que queremos. Tenemos que inventar un modo de reducir el valor de la tensión que le llega al motor. La forma más sencilla de hacerlo es a través de un divisor de tensión.
Un divisor de tensión es una configuración de elementos eléctricos que consigue que la tensión, allí donde yo quiero aplicarla (la que llega al motor), sea menor que la nominal (la que viene de la catenaria). Y esto se consigue con una cosa tan sencilla como una resistencia.
Una resistencia eléctrica es un artilugio que, como su propio nombre indica, presenta resistencia a la circulación de corriente eléctrica, provocando que entre sus bornas (las puntas) caiga una tensión que es proporcional a la resistencia que presenta.
Vamos a aclarar esto. Vamos a suponer que nuestra fuente de tensión es un depósito de agua, los cables son tuberías, y todo lo que conectamos al circuito eléctrico son grifos, codos, válvulas, etc... La tensión viene representada por la altura que alcanza el agua en el depósito. La corriente sería la cantidad de agua que pasa por las tuberías. Una resistencia sería un estrechamiento en una de las tuberías. Bien, pues ese es exactamente el efecto que provoca una resistencia, que puede pasar menos agua por ese punto.
Ahora conectamos la resistencia en serie con el motor. En serie quiere decir que ponemos una borna de la resistencia a la catenaria, y la otra borna al motor. Y del motor, la borna que nos queda la conectamos al carril. Luego ya, el carril y la catenaria están conectados entre sí en la subestación, pero cómo se hace, ahora no nos importa. Así pues, la tensión que le llega al motor es menor cuanto mayor sea la resistencia. Algo así:
 |
| Motor y resistencia en serie. |
Pero claro, es poco factible estar cambiando la resistencia según queramos que aumente la velocidad del motor. Así que lo que se hace es poner muchas resistencias pequeñitas en serie y nosotros conectamos nuestro motor a las bornas que nos interesen en cada momento. Lógicamente no lo hacemos a mano, sino a través de contactores, relés, interruptores y demás cachivaches.
Un ejemplo. Tengo 10 resistencias entre la catenaria y el motor. Las vamos a numerar del 1 al 10, siendo la resistencia 1 la primera justo después del pantógrafo y la 10 la última. Están todas conectadas en serie, una tras otra, y la borna que queda libre de la 10 está al aire, o sea, sin conectar. Una de las bornas del motor está en las ruedas (que están conectadas eléctricamente al carril, recordad que son de hierro) y la otra la tengo yo en la mano (sólo figuradamente claro). Cuando quiero empezar a moverme, conecto el cable del motor a la resistencia 10 (a la borna al aire). Así, me está llegando al motor una tensión que es 10 veces menor que la de la catenaria (unos 300 Voltios). Y con estos 300 Voltios, mi motor gira a 100 rpm (revoluciones por minuto), por ejemplo.
 |
| Resistencias en serie con el motor. |
Cuando el motor haya alcanzado esa velocidad o a mí me interese ir más rápido, quito el cable de la resistencia 10, y lo pongo en la 9 (entre la 9 y la 10). Ahora me están llegando al motor más Voltios que antes. Ahora mi motor gira más rápido. Levanto el cable y lo pongo en la resistencia 8, y aumenta la tensión en bornas del motor, lo que le obliga a girar más rápido. Luego levanto el cable y lo pongo en la 7, en la 6, en la 5, y así hasta que el motor va "a toda leche" y finalmente lo conecto directamente a la catenaria, con lo que le llegan los 3.000 Voltios y el motor va "a tope". Hala, ya estamos corriendo. Sencillo, ¿verdad? Es lo que se llama el control reostático del motor.
 |
| Secuencia de conexión de resistencias para regular la velocidad del motor. |
Sólo tiene una pega (grande). La resistencia, por el mero hecho de serlo, se calienta cuando pasa corriente a través de ella, por lo que parte de la energía eléctrica que hemos empleado para acelerar el motor, la hemos perdido en forma de calor. Así que tenemos que poner unos ventiladores grandes para disipar ese calor y que no se nos queme la máquina. Como conclusión, no hemos aprovechado toda la energía que hemos consumido para convertirla en movimiento. Hemos perdido parte en forma de calor.
Además de esta conexión, que es la más sencilla que podemos hacer, también se hacen otro tipo de conexiones. Por ejemplo se hacen combinaciones de motores en serie, o en paralelo, o mezclas de las dos, y además se usan otro truquitos eléctricos, como los shuntados, pero como la intención es que tengáis una idea y no hacer un curso completo de tracción eléctrica, no vamos a entrar tanto en detalle. Pensad que hay ingenieros que dedican toda su carrera a desarrollar estos sistemas.
La mayor parte de las locomotoras de corriente continua antiguas eran de este tipo, como las 6000 (260), 6100 (261), 7000 (270), 7100 (271), 7200 (272), 7300 (273) de Norte, las 1000 (281) del Estado, las 1100 (282) del BPT, las 7400(274), 7500 (275), 7600 (276), 7700 (277), 7800 (278), 7900 (279), 8900 (289), 10000 (280), 269 y 250 de Renfe, y en cuanto a unidades, las 300 de Norte/Renfe, las 400 (434), 500 (435.500), 600 (436), 700 (437), 800 (438), 900 (439), 432, 440, 441, 443, 444, 448 y, aunque parezca mentira, los AVEs 100 y los desaparecidos Euromed 101.
Otras formas de control en continua
Como el gran inconveniente del control reostático es la pérdida de energía en forma de calor, vamos a intentar minimizarla. Y esto lo conseguimos gracias a la electrónica.
Una de las formas más habituales de control electrónico (en los trenes, al menos) es un tipo de señal llamado PWM (Pulse Width Modulation en inglés, Modulación de Ancho de Pulso en castellano). También es conocido como chopper o "troceador" en inglés. Y es que, precisamente, se trata de eso, de trocear una tensión continua para engañar al motor pensando que es una continua.
Vamos a generar ahora una señal periódica cuadrada de frecuencia alta. Es una señal (llamamos señal a cualquier magnitud eléctrica con variación en el tiempo) cuyo valor va a ser el máximo durante un periodo de tiempo, y luego cero durante otro periodo. Pasado ese tiempo, se vuelve a repetir tal cual. Es también lo que llamamos frecuencia (en realidad, frecuencia es el inverso del periodo). Normalmente esta frecuencia está en la franja de los Kilohertzios (kHz). La frecuencia es alta para un motor, no para otras aplicaciones. Así, por ejemplo, una señal de 1 kHz (o 1.000 Hz) tiene un periodo de 1 ms (1 milisegundo o una milésima de segundo), es decir, que la señal se repite 1.000 veces por segundo. Y por último, antes de seguir, vamos a definir lo que es el ciclo de trabajo: es la parte del periodo en el que la señal tiene el valor máximo. Se suele expresar en porcentaje.
De esta forma, con una señal PWM de 1 kHz, si el ciclo de trabajo es del 10 %, quiere decir que durante una diezmilésima de segundo el valor de la tensión es máximo, y durante las 9 diezmilésimas siguientes, es cero. Si el ciclo de trabajo es del 50 %, serán 5 y 5. Y si es del 90%, serán 9 y 1.
Aquí, un ejemplo de señal PWM.
¿Y cómo conseguimos engañar al motor de continua para que piense que esta señal tan extraña es continua?
Pues resulta que el motor, por su construcción eléctrica (todas esas bobinas y demás) es muy reacio a los cambios bruscos de corriente o tensión, y responde con una fuerza electromotriz que hace que todos los cambios se hagan tranquilamente y despacio (cuanto más grande el motor y más grandes las inercias, más despacio, por eso en un motor chiquitito tipo Scalextric o Ibertrén los cambios son rápidos, y en un secador de pelo son más lentos). Y precisamente por esa fuerza electromotriz, el motor "cree" que la tensión es continua. Y además, el efecto es que si aplicamos una PWM del 25%, el motor de nuestro tren "cree" que le están llegando 750 V (un 25% de 3.000). Y si es del 10%, "creerá" que le llegan 300 V. Y si la señal es del 100%, entonces no cree nada, es que le llegan 3.000 Voltios directamente.
Con esto hemos conseguido quitarnos de enmedio las resistencias para el arranque, y ya no perdemos energía en calentarlas inútilmente.
De este tipo son las locomotoras y unidades eléctricas medianamente modernas, como por ejemplo las 250.600, 251, 269.600, 440.500, 442, 445, 446, 450 y 451 de Renfe. Y sí, el chopper es ese zumbido tan molesto que se oye en algunas 446 de Cercanías al arrancar o frenar.
Y ahora, vamos a frenar.
El freno eléctrico
Si tuviéramos que frenar el tren sólo con las zapatas de freno, nos las cargaríamos a nada que tuviéramos que frenar unas pocas veces. Por eso, vamos a aprovechar los motores eléctricos para que nos ayuden a frenar.
Con la misma configuración de antes de resistencias y motor, ahora desconectamos las resistencias de la catenaria, y el motor de las ruedas y conectamos una borna del motor a la resistencia 1.
Hay algo que no os he contado antes, que voy a aprovechar para hacerlo ahora. Un motor eléctrico también puede funcionar al revés. Es capaz de generar electricidad a través del movimiento. Igual que antes se generaban campos magnéticos al pasar la corriente, resulta que si movemos una bobina en el interior de un campo magnético, se genera corriente eléctrica. Y ese efecto es el que vamos a aprovechar para frenar.
Cuando desconectamos el motor de la catenaria, éste, al girar, genera una tensión en sus bornas. Con la borna del motor que tenemos al aire, vamos a conectarla a la resistencia 10, que la seguimos teniendo al aire.
 |
| Configuración para frenado eléctrico. |
Ahora, la tensión que está generando el motor está provocando el paso de corriente eléctrica por todas nuestras resistencias, y esto hace que el motor empiece a frenarse. Es la llamada fuerza contraelectromotriz. A medida que el motor va girando cada vez más despacio, o en función de la cantidad de freno que yo necesite, conecto el motor a las resistencias 9, 8, 7, 6 y así hasta la 1, en que tengo, cada vez, mayor fuerza de frenado. Por último, la máxima fuerza de frenado se obtiene cortocircuitando el motor, o sea, conectando las bornas del motor entre sí directamente.
 |
| Secuencia de conexión de resistencias para frenado eléctrico. |
El inconveniente es que nunca podré llegar a parar el motor del todo, puesto que, cuanto más despacio gire el motor, menos tensión genera y menos fuerza contraelectromotriz tengo, así que llega un momento en que el freno eléctrico no es efectivo. Pero como ya he reducido la velocidad del tren mogollón, ya puedo usar el freno de zapatas sin miedo a desgastarlas excesivamente.
Además, el freno eléctrico (o reostático), no es tan efectivo ni tan potente como el neumático, por lo que muchas veces se usan ambos conjuntamente.
Y ya que estamos con inconvenientes, ese paso de corriente por las resistencias provoca que toda esa energía se disipe en forma de calor, por lo que toda la energía que hemos usado para que nuestro tren se mueva, la desperdiciamos ahora calentando la atmósfera, o sea, calentando nada.
Pero, el freno eléctrico tiene una ventaja muy importante. Y es que puede ser regenerativo, es decir, que esa energía que antes se iba en calor, ahora se la entregamos a la catenaria para que cualquier otro tren que circule por ese tramo pueda aprovecharla. Lo que pasa es que, en continua, ésto tiene un efecto negativo, que cuando la catenaria u otros trenes no admiten más energía, hay que pasarla por las resistencias y perderla en calor.
Corriente alterna
La corriente alterna (ya hemos dicho que deberíamos de decirle más bien tensión alterna) es la que, al contrario que la continua, no tiene un valor fijo a lo largo del tiempo, sino que éste va cambiando. La tensión alterna más habitual es aquélla cuyo valor oscila de forma sinusoidal con una frecuencia de 50 Hertzios. Es decir, la que tenemos en casa, que cambia de polaridad (de +220 a -220 Voltios) 50 veces por segundo.
Esto es una señal sinusoidal como la que llega a los enchufes de vuestra casa:
Un motor de corriente alterna es casi igual que uno de continua, sólo que, en lugar de imanes permanentes en la carcasa, ponemos bobinas, o sea, un cable arrollado en la propia carcasa, formando así el estátor. El paso de corriente eléctrica alterna provoca un cambio de polaridad magnética constante. A su vez, el paso de corriente por las bobinas del rotor, provoca lo mismo. Y todos esos cambios de campos magnéticos provocan que el motor gire. El único problema es que girará siempre a la misma velocidad (caso del exprimidor o la batidora si es antigua). Por eso es por lo que las primeras locomotoras eléctricas de España (en vía ancha), las del Gérgal-Santa Fe, sólo podían ir a 12,5 o a 25 km/h.
Pero las locomotoras 1 a 7 del Gérgal-Santa Fe no fueron las únicas trifásicas de España. En 1963 Renfe adquiere 4 más que conformaron la serie 21 a 24, aunque sólo estuvieron 4 años en servicio por la obsolescencia del sistema trifásico.
Por eso se inventaron los motores síncronos y asíncronos. En éstos se consigue variar la velocidad variando la frecuencia de la señal que les llega. Pero claro, esto sólo se pudo hacer de forma sencilla y barata con la expansión de la electrónica de potencia, ya que, gracias a ella, podemos generar cualquier tipo de señal con cualquier valor que se nos ocurra.
En España tenemos, principalmente, dos tipos de locomotoras o unidades eléctricas de alterna. Por un lado están las locomotoras y unidades que se alimentan en continua, pero cuyos motores son de alterna como las 252, 253, 490, 449, Civias, 120, 121, 130 y 730. Bueno, la verdad es que estos últimos 4 vehículos son un tanto especiales en este sentido porque se pueden alimentar en alterna y en continua.
En todos estos vehículos, que se alimentan con tensión continua, pero cuyos motores son de alterna, hay unos equipos electrónicos bastante avanzados que convierten esa tensión continua en alterna y pueden variar la frecuencia, la amplitud (el valor de la tensión) y prácticamente todos los parámetros que se nos puedan ocurrir. Además, también se pueden programar para hacer arranques más lentos, más rápidos, más económicos, o cualquier otra cosa que se nos ocurra.
También están los vehículos que se alimentan directamente en alterna de la catenaria y tienen motores de alterna, como los 102, 103, 104, 112, 114, 120, 121, 130, 730 y las 252 de las LAV. Estos vehículos se alimentan con la tensión de 25.000 V en alterna a 50 Hz. Sin embargo, llevan sistemas de control de potencia muy similares a los anteriores.
Freno regenerativo
Como dijimos antes, un motor eléctrico se puede convertir en un generador. Sólo hace falta que, en vez de aplicarle tensión, lo movamos y conectemos algo a sus bornas. Con los motores de alterna pasa lo mismo. Sólo que aquí ya podemos devolver energía a la red eléctrica general. La razón es muy sencilla.
Transformar corriente alterna en corriente continua es bastante fácil y barato. Sólo hacen falta unos rectificadores adecuados. Los más sencillos suelen ser diodos, y su coste es bastante bajo, dependiendo de la aplicación. Pensad, por ejemplo, en lo que cuesta un cargador de móviles, o de pilas recargables. Esa transformación, en el ferrocarril, es la que se hace en las subestaciones, que, como dijimos, reciben corriente alterna de la red eléctrica general y la transforman en continua, que es la que nos hace falta para los trenes.
Sin embargo, transformar corriente continua en alterna es algo más complicado. Hacen falta equipos mucho más caros y complejos. Hasta la proliferación de la electrónica de potencia, era algo casi imposible de hacer, salvo que se hiciera con motores y alternadores, pero claro, aparte de caros, son aparatos que requieren un mantenimiento constante. E incluso, con electrónica de por medio, sigue siendo muy costoso para las magnitudes eléctricas que maneja el ferrocarril.
Pero, transformar corriente alterna en otra corriente alterna es muy sencillo. Mucho más que de alterna a continua. Aquí sólo nos hacen falta unos transformadores, como los que usábamos antiguamente para hacer funcionar los aparatos de 125 a 220, sólo que un poquito más bestias. Y esos transformadores pueden ser exactamente los mismos que tenemos en las subestaciones.
Pues ahora, sabiendo todo esto, imaginad que un tren de alterna (un AVE, por ejemplo) sale de una estación. Lógicamente, al estar acelerando, consumirá energía, que tendrá que entregarle una subestación y que la recibirá, a su vez, de la red eléctrica general. Ese tren llega a su máxima velocidad y tiene que empezar a frenar. La lógica nos dice que para bajar de 300 km/h a 0, lo ideal es usar el freno eléctrico. En ese momento, los motores pasan a convertirse en generadores y nos van a generar una tensión alterna de 50 Hz, exactamente la misma que la de la red eléctrica general. Esa energía que estamos generando ahora, el tren se la entrega a la catenaria, y ésta la transporta hasta la subestación. Si hay algún tren en ese tramo que esté demandando energía, la subestación se la entregará a ese tren, pero si no lo hay, no la puede almacenar. Pero da la casualidad de que es corriente alterna a 50 Hz. Asi que la subestación, ni corta ni perezosa, la transforma a la misma tensión que le llega de la red eléctrica general y se la devuelve, así, sin más. "Toma, no me hace falta." Y la red eléctrica, que es muy lista, se la queda y la distribuye a quien haga falta, que puede ser, por ejemplo, el ordenador con el que estás leyendo esto ahora mismo. (bueno, es un caso hipotético, pero posible).
De todo esto puedes deducir de forma muy sencilla, que los trenes AVE no son esos tragones brutales de energía eléctrica (que lo son, pero no tanto), porque parte de la energía que han consumido para poder ponerse a esas velocidades, luego la devuelven a la hora de frenar.
Pero ahí no queda todo. Resulta que los trenes, gracias a esas masas tan grandes que mueven (un tren AVE serie 100 pesa unas 420 toneladas) tienen unas inercias brutales. Es decir, que si lo pongo a tope, a 300 km/h y dejo de acelerar, por sí solo tardara muchos kilómetros en pararse. Pero muchos, ¿eh? Hasta tal punto es así, que hubo un estudio hace años (lamento no tener la referencia) que demostró que un AVE serie 100 entre Madrid y Sevilla, circulando a la máxima velocidad permitida en cada tramo, circulaba un 75% del tiempo con el regulador cerrado, o sea, sin consumir nada de nada (bueno, sólo alumbrado y climatización). Es decir, que de las 2 horas y cuarto que dura el viaje, el tren sólo estaba consumiendo energía durante media hora. El resto del tiempo, o estaba a cero, o estaba devolviendo energía a la red.
Otros tipos de freno eléctrico
Algunos habréis oído algo sobre los frenos eléctricos que tienen los AVE serie 103 (los Velaro de Siemens, que circulan, con pocas modificaciones, en Alemania, Francia, Holanda y España). Es un freno llamado "freno de corriente de Foucault". Está basado en un efecto que se produce cuando un conductor eléctrico atraviesa un campo magnético variable. En ese caso, se genera una corriente eléctrica debida a la energía cinética (el movimiento del tren) que podemos transformar fácilmente en calor que se disipa rápidamente a través de los carriles. Si queréis una explicación más extensa, os recomiendo (siempre que habléis inglés o alemán) los siguientes enlaces de la Wikipedia:
Y con esto, creo que podemos dar por terminado este capítulo.
Edito para decir que sí, que hay una falta de ortografía enorme que se repite a lo largo de la entrada. Hercio se escribe con "c", y no con "tz", error que viene de que la unidad se llama así en honor a Heinrich Rudolf Hertz y que la unidad, en español, se puede llamar "Hertz" o "Hercio".

































{kind=link}